Mejorar la refrigeración del motor brushless.
Permita una amplia circulación de aire alrededor del motor brushless para su correcta refrigeración. A veces podemos mejorar las prestaciones del motor refrigerandolo con un ventilador.
Permita una amplia circulación de aire alrededor del motor brushless para su correcta refrigeración. A veces podemos mejorar las prestaciones del motor refrigerandolo con un ventilador.
Recomendamos utilizar un sistema de bucle cerrado por su estabilidad y precisión.
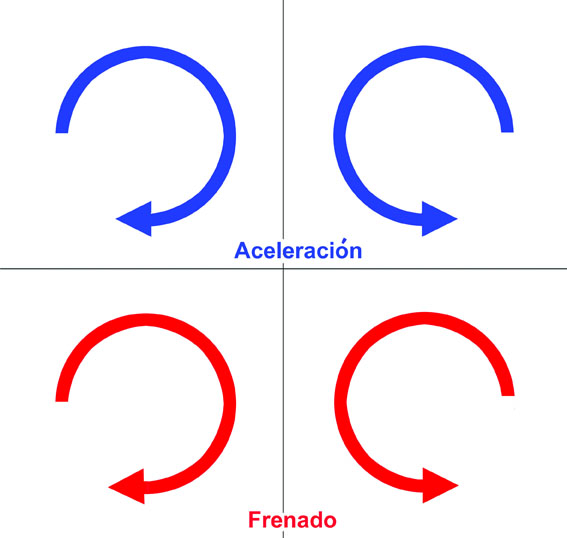
Absolutamente necesario en posicionamiento de motor bushless.
Unidad: rpm/V (revoluciones por minuto por Voltio)
Muestra la velocidad específica por voltio del voltaje aplicado sin contar las pérdidas por fricción. Cálculo de la constante de velocidad.
En la práctica, kn se determina por el voltaje nominal U y la velocidad en vacío n0.
En el cálculo teórico, deben tenerse en cuenta las dimensiones del bobinado (longitud l, diámetro, número de espiras w), así como la fuerza del campo magnético B0. La constante de velocidad está relacionada con la constante de par kM porque éstas se determinan por los mismos parámetros.
El recíproco de la constante de velocidad se conoce como la constante de generación (back EMF), constante de voltaje o fuerza contra electromotriz. Expresa el voltaje en los terminales por la velocidad si el motor sin escobillas se usa como tacodinamo CC o generador.
La velocidad V es la velocidad de giro, normalmente expresada en rpm.
La fuerza F se expresa en par (torque) que es un producto de una fuerza en kg o Newtons, por un brazo o radio r expresado en metros o milímetros.
Ej.: 10 Nm (Newton metro), seria una fuerza de 10 Newtons (aproximada mente 1 kg) por un brazo o radio de 1 metro de largo.

(Haga click para ampliar)
Esto evitará que un tirón accidental de los cables arranque los terminales e inutilice el motor brushless.

Click para ampliar
Existen terminales aislados en el exterior. Si no, utilice un pequeño tubo termoretráctil que al calentar se adaptará a la forma del terminal, aislándolo.

Click para ampliar
No tenemos una medición del resultado en la salida. Por el contrario, son sistemas más económicos que los sistemas de bucle cerrado, con menos componentes y menos cableado.
Así, si tenemos por ejemplo una cinta transportadora donde la carga oscila, el motor sin escobillas o motor brushless reducirá / aumentará su velocidad sin mantener una velocidad constante estable. Se pueden alcanzar caídas de velocidad, importantes. Otro ejemplo de pérdida de control se asocia a los motores de paso a paso, donde una pérdida de un pulso, no es compensada ni detectada por el sistema.

Click para ampliar
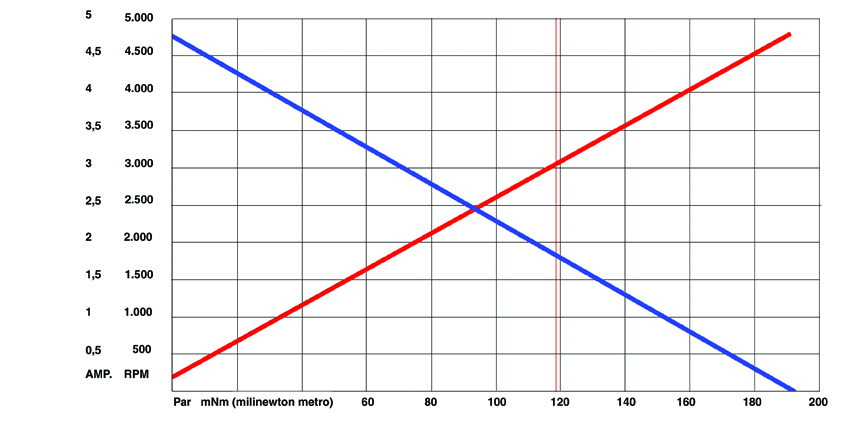
Esto es aplicable a motores con o sin escobillas (brushless). Estos últimos necesitan una electrónica de control de la conmutación. La constante de velocidad (Kn), propia de cada bobinado, determina la velocidad de giro del motor brushless en función del voltaje de alimentación.
nm = Kn x U
En la gráfica se puede ver el efecto de una bajada de tensión de alimentación. La curva velocidad par original (en azul) se desplaza paralelamente hacia abajo al bajar de 24 V a 12 V. Manteniendo la misma carga, se alcanza el punto de trabajo 1 a una velocidad inferior.
Este parámetro se refiere al tiempo requerido por la corriente para aumentar o disminuir.
Típicamente, la constante eléctrica de tiempo es de 100 a 1.000 veces más pequeña que la constante mecánica de tiempo. Los cambios de corriente ocurren instantáneamente comparados con los cambios en velocidad.

Un fenómeno a destacar cuando la corriente puede reaccionar de manera tan rápida, es el caso de los motores sin escobillas que son alimentados mediante PWM. En algunas ocasiones se puede producir un rizo de corriente no deseado, que sobrecaliente el motor brushless. En estos casos, puede que sea necesario aumentar la frecuencia del PWM o conectar una inductancia adicional (p. ej. bobinas de choque) la representacion gráfica es similar a la de la constante mecánica de tiempo, en la foto.