Comportamiento de los motores brushless.
Si el motor sin escobillas funciona continuamente con este valor de corriente y a 25°C de temperatura ambiente, se calentará hasta alcanzar la máxima temperatura del bobinado. Se asume que el motor brushless no tiene refrigeración adicional, ni siquiera mediante contacto con otras piezas que puedan hacer de radiador de calor. Dependiendo de cómo esté montado el motor, este valor puede aumentar sustancialmente. Por el contrario, un aumento de la temperatura ambiente reduce la corriente máxima en continuo.
La máxima corriente en continuo es específica de cada bobinado. Los bobinados con baja resistencia óhmica admiten corrientes más altas que los bobinados con alta resistencia. En los motores sin escobillas con bobinados de resistencia muy baja, la máxima corriente en continuo puede estar limitada por el sistema de conmutación y no por el bobinado.
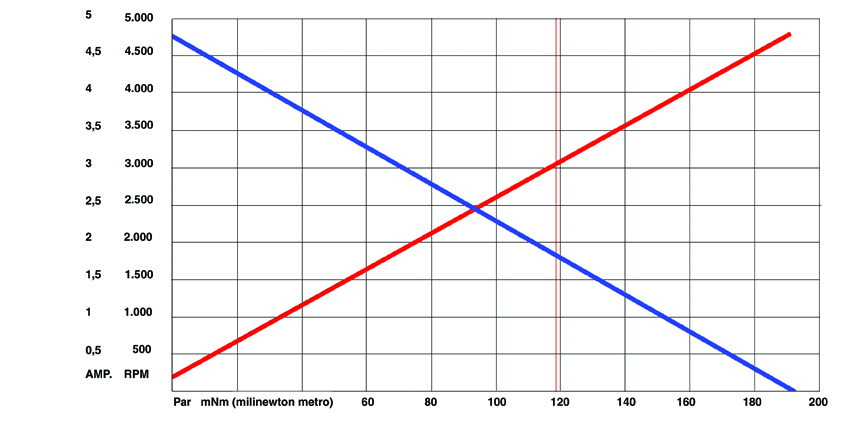
La máxima corriente en continuo es equivalente al máx. par permanente. Están relacionados por la constante de par kM .
En los motores brushless la máx. corriente en continuo es el valor eficaz de las corrientes de las tres fases, girando a la velocidad de rotación indicada y a 25°C de temperatura ambiente, resultando en una temperatura máx. del bobinado de 125°C. Cuando la velocidad aumenta, por ejemplo por encima de las 20.000 rpm, la máxima corriente en continuo disminuye debido al efecto del calor generado por las pérdidas en el hierro. En la gráfica sería el punto inferior izquierdo de la zona coloreada.

Click para ampliar