Controles de funcionamiento 4 Q (cuatro cuadrantes) motor brushless.
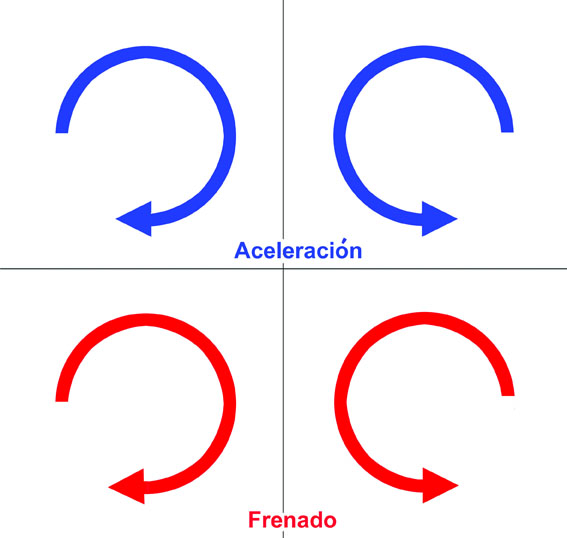
Acelera y frena al motor brushless en los dos sentidos de giro.
Absolutamente necesario en posicionamiento de motor bushless.
Absolutamente necesario en posicionamiento de motor bushless.
Símbolo: U
Unidad: V (Voltio)
Es el voltaje al cual se han medido los datos nominales (velocidad en vacío, par de arranque, corriente de arranque, máx. potencia de salida, máx. rendimiento).
Se ha escogido este dato para no exceder la máxima velocidad recomendada en vacío. Por supuesto, el uso del motor sin escobillas no está limitado a este voltaje. Para alcanzar la potencia nominal asignada se permiten voltajes de trabajo más elevados. La velocidad en vacío, par de arranque y corriente de arranque dependen directamente del voltaje aplicado.

Un dinamómetro puede ser un simple peso de cocina (de los de muelle). Atamos el dinámometro a la carga con un cordel y empezamos a tirar suavemente hasta que la carga empieze a desplazarse lentamente. En ese momento registramos el peso que marca en gramos o Kg. que, multiplicado por el radio de la polea, nos dará el par de fricción.
Este es el par de fricción, ó resistencia, que deberá vencer el brushless motor antes de poder acelerar.
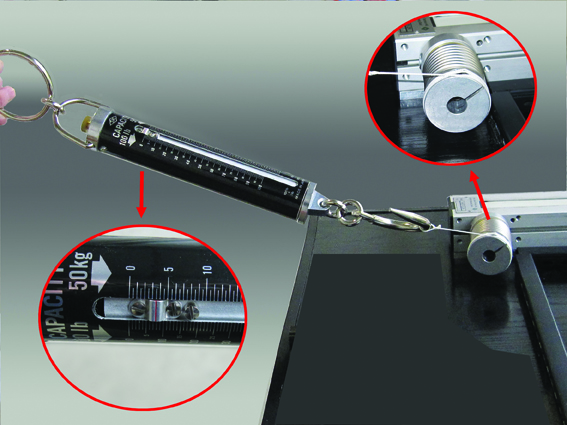
Click para ver detalle
Ejemplo: una fuerza de 1 kg (1 kg = 10 Newton) con un diámetro d de polea de 10 cm. (radio r = 5 cm) .
Es un par de 5 kgcm, aproximadamente 500 mNm.
Para evitar que deslice sobre la polea o el piñón. Si el eje del motor brushless o la reductora tienen una parte plana, asegúrese que el tornillo prisionero aprieta en esta parte plana. Recomendamos usar sellador de tornillos en la rosca del tornillo prisionero para evitar que se afloje. Si el par de torsión es muy elevado y el prisionero resbala, utilice dos tornillos prisioneros a 90º. El resultado del apriete de estos dos tornillos es un efecto “cuña” que impide que el eje deslice.


Para muchos es la mejor manera de transmitir desde el eje del motor sin escobillas.
El acoplamiento, al ser elástico absorbe los pequeños desalineamientos entre ejes, salvaguardando al rodamiento del motor brushless de indeseadas cargas radiales producidas por el desalineamiento.
Su resistencia a la torsión es bastante alta, con lo cual no añaden holgura o juego a los sistemas de posicionamiento, compatible con motor robótica. Se monta con tornillos y se piden por diámetros de eje.

Aprende a hacer una correcta instalación y montaje del motor brushless. Diversos esquemas y diagramas. Prolonga la vida útil del motor y evita los problemas típicos de conexión e instalación. Entra ya a navegar a través de sus múltiples vínculos.
